Мониторинг обмена данными с serial-портом
Иногда надо сниффать serial-порт на предмет того, что туда пишется/читается софтиной.
Есть сниффер jpnevulator.
jpnevulator --timing-print --tty /dev/ttyACM0
Но он не совсем удобен. Так как он не сниффер на смом деле, а простой ридер-писатель для порта.
Поэтому если запустить его совместно с другой софтиной, то она данных на порту не увидит.
А нам нужен именно сниффер.
Можно создать виртуальный порт с помощью pyserial. И читать/писать данный и реального в виртуальный порт и наоборот (MITM), но стоит ли? :)
Воспользуемся strace!
$ strace -e trace=read,write python terminal.py
# тут я вырезал кусок, который относится к питону
write(3, "P", 1) = 1
write(3, "P", 1) = 1
read(3, "P", 1) = 1
read(3, ";\26\225\320\0k,\r\0", 9) = 9
write(1, "3B 16 95 D0 0 6B 2C D 0\n", 243B 16 95 D0 0 6B 2C D 0
) = 24
write(3, "S\3\377\0\377", 5) = 5
read(3, "\377\0\377", 3) = 3
write(1, "FF 0 FF\n", 8FF 0 FF
) = 8
write(3, "S\5\240\244\0\0\2", 7) = 7
read(3, "\244", 1) = 1
write(3, "S\2?\0", 4) = 4
read(3, "\237#", 2) = 2
write(1, "9F 23\n", 69F 23
) = 6
write(3, "S\5\240\300\0\0#", 7) = 7
read(3, "\300\0\0Z\0?\0\1\0\0\0\0\0\26\263\3\7\4\0\203\212\203\212\0\3\0\0Z\0\0\0Z"..., 38) = 38
write(1, "C0 0 0 5A 0 3F 0 1 0 0 0 0 0 16 "..., 89C0 0 0 5A 0 3F 0 1 0 0 0 0 0 16 B3 3 7 4 0 83 8A 83 8A 0 3 0 0 5A 0 0 0 5A 0 2F 6 2 90 0
) = 89
write(3, "H", 1) = 1
+++ exited with 0 +++
И вот уже вожделенный протокол обмена на экране. :)
Делаем подсветку синтаксиса для less

Дефолтный вывод less в консоли чрезвычайно скучный. И рассматривать километры одинаковых черно-белых листингов утомляет (или зеленых если у вас Ъ-хакерский терминал :)).
Так привнесем же цветность в наши черно-белые терминал.
$ sudo yum install python-pygments
А затем прописываем в .bashrc
export LESS="-R"
export LESSOPEN="|pygmentize -g -O encoding=utf8 %s"
Кодировку ставим на выбор. Но если чаще всего работаем в юникоде, то и оставляем юникод.
При этом будет подсвечиваться только вывод less, который вызван в дефолтной форме
$ less filename
Вывод же less, который работает с перенаправленным вводом подсвечиваться на будет. :)
Kinect: о восстановлении координат и абберациях разного рода
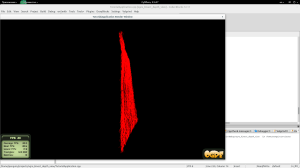
Нет. Вы не подцмайте ничего. это плоскость - вид сбоку. А точнее мой потолок. И не посмотри я на него через сенсоры кинета, то в жизни бы не узнал, насколько он “плоский”. :-D На самом деле потолок-то плоский. Но только разного рода нелинейные искажения, которые вносят сенсор и линзы не компенсируются ни встроенными калибровочными константами (которые зашиваются в каждую модель на заводе), ни функцией преобразования глубины кинекта в глубину реальную. Т.е. в метры/миллиметры.
Так что же не так?
Начнем с самого начала. Функция преобразования данных с датчика в глубину нелинейна по своей природе. Т.е. чем ближе объект наблюдения, чем с большей точностью мы можем мерять расстояние до объекта. Чем объект дальше, тем точность меньше. А это значит, что на 1 диницу шага датчика на ближнем расстоянии приходится меньше миллиметров.
На сейчас ребята из openni предлагают новую версию функции преобразования сырых данных в метрические.
0.1236 * tan(rawDisparity / 2842.5 + 1.1863)
Эта формула даст нам значения в метрах. Есть еще одна формула (она предлагалась раньше).
1/(rawDisparity * -0.0030711016 + 3.3309495161)
Теперь говорят, что она морально устарела. :)
Посмотрим на обе формулы.
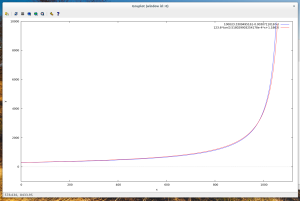
Тут мы видим, что обе дают практически одинаковый результат. Даже если их и увеличить, то расхождения будут заметны только на сильно высоких значениях датчика. Стоит заметить, что по иксу - это сырые данные. А по игреку - восстановленное расстояние (в миллиметрах. для удобства обе функции были домножены на 1000).
Ок. Расстояние есть. Дальше нужно получать как-то координаты x и y. Так как с одной глубиной ничего интересного не получиться.
Тут все интереснее.
Мы знаем из спецификации сенсора (я говорю про первую версию если что):
- угол обзора по горизонтали - 58 градусов
- угол обзора по вертикали - 45 градусов
- количество точек с датчика - 640х480
И тут у нас должно появиться подозрение на эти спеки. Почему? Потому что ничего не говорится про относительный шаг между точками по горизонтали и по вертикали.
Как мы можем предположить - расстояние измеренное от плоскости отображения до вируальной камеры должно быть всегда одинаковое, как бы мы его не мерили.
Но что же получается. А получается следующее (изображение уперто отсюда).
tan(45/2)/tan(58/2) = 0,747261047
А это значит, что точка по вертикали будет 0,747261047, а точка по горизонтали - 1.
Отлично. соотношение расстояний между точками по горизонтали и вертикали нашли.
Тперь надо найти точки.
После того, как данные глубины получены с кинекта формируем массив координат.
(x_v, y_v. raw_depth)
Здесь x_v и y_v - это всего лишь индексы строки и столба в двумерном массиве глубин.
x_v = [0, 639] y_v = [0, 479]
дальше надо лишь превратить эту точку в точку с реальными координатами.
z_w = 123.6 * tan(depth / 2842.5 + 1.1863)
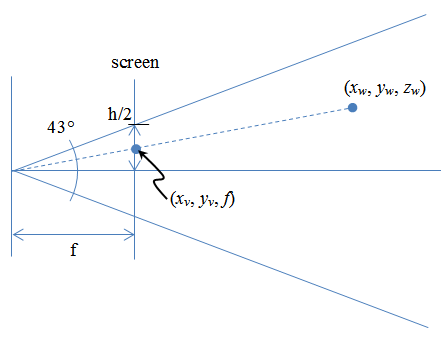
Эм. А x_w и y_w? Тут все просто. По картинке выше мы знаем, что
x_v/f = x_w/z_w
Где f - это расстояние от камеры, то вьюпорта.
f = MAX_X/2 / tan(58/2) = 639/2 / tan(58/2) = 319.5/tan(58/2)
Или аналогично для оси ординат. Но тут не стоит забывать про коэффициент отношения между расстоянием по горизонтали и вертикали.
f = 0.747261047*239.5/tan(45/2)
Теперь все просто
x_w = (x_v - 640/2) * z_w / f y_w = (y_v - 480/2) * 0.747261047 * z_w / f
В случае с y_w не забываем про масштабный коэффициент.
Но все эти вфводы позволяют нам лиш частично восстановить изображение. И все потому, что функция глубины - это фукция от трех переменных: x_v, y_v и depth, а не просто от depth. :) Так как влияние разного рода аббераций слишком велико (не то чтобы слишком +-10 самнтиметров по краям на растоянии 2 метра).
Поэтому пока мой потолок будет зображать из себя часть поверхности сферы (или цилиндра) неопределенного радиуса.
UPD
Kinect: избавляемся от искажений при помощи потолка

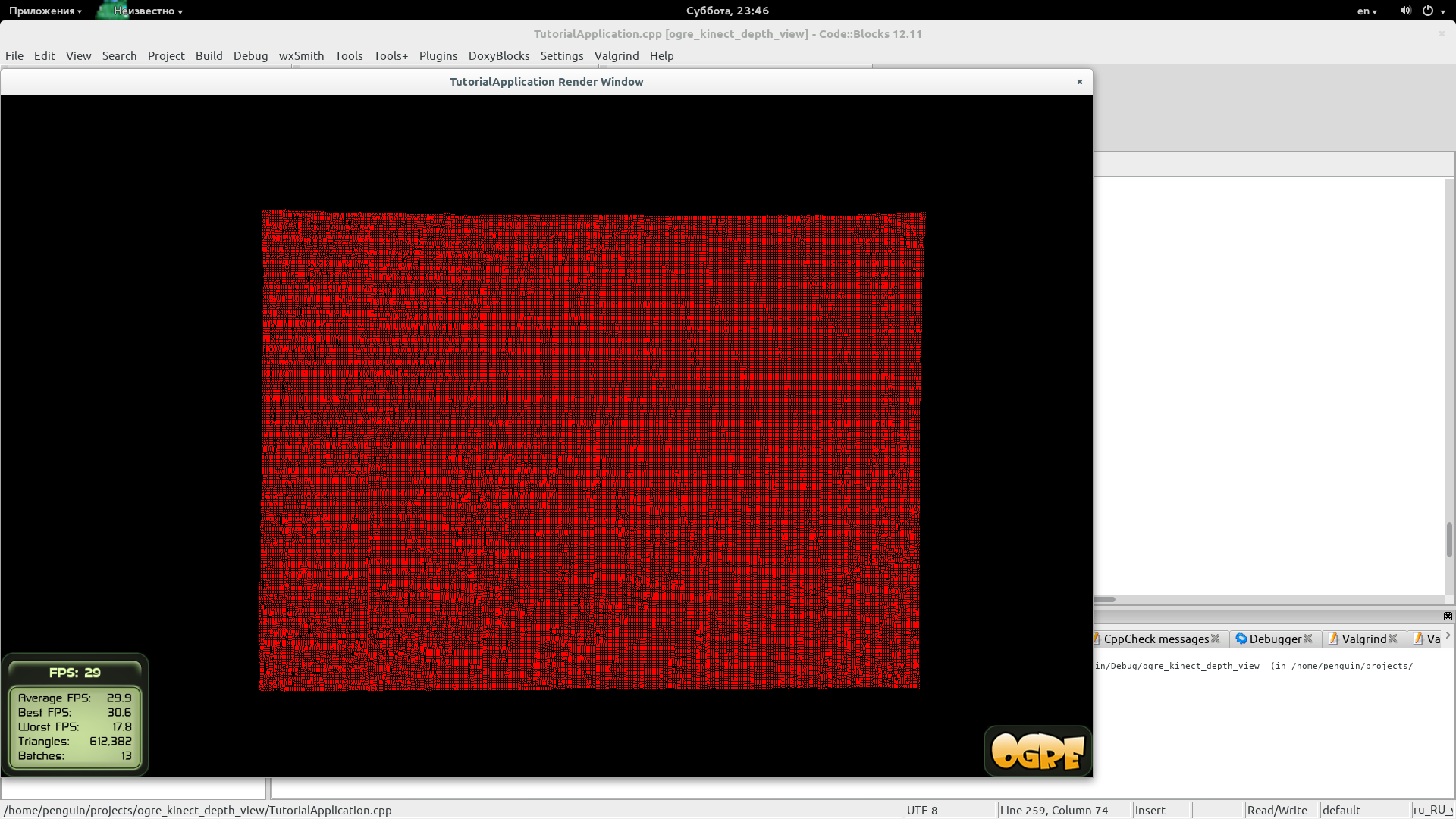
Давеча я писал про то, как выглядят данные, которые приходят с сенсора. Такое поведение сенсора просто возмутительно и долго это продолжаться не может.
Ок. А что нам потребуется? Нам потребуется потолок. Я внимательно его осмотрел и убедился, что в реальности он плоский. А вот на восстановленом изображении - нифига.
Для начала нам нужно сохранить дамп глубин “идеального” потолка. Можно и стену если у вас есть достаточно плоской поверхности. :)
В файл будет сохранена двумерная матрица из чисел разделенных пробелами. Строки по строкам и т.д. Позже поймем зачем именно так.
Кусочек файла
888 889 890 890 890 890 890 891 890 891 891 892 892 892 892 892 892 892 892 892 891 893 892 892 892 892 892 ... 2047 2047 2047 2047 2047 2047 ...
Теперь посмотрим на картинку этой самой плоскости. Для этого запускаем maxima.
(%i1) load(numericalio);
(%i2) m: read_matrix("<путь к файлу с глубинами>");
($i3) f(x, y) := float('m [round(x), round(y)]);
-- тут мы зададим функцию извлечения нужного значения из матрицы.
-- Так как матрица наши данные дискретны
-- и существуют только в определенных точках
(%i4) plot3d (f(x, y), [x, 1, 640], [y, 1, 480]);
О! Круто. Мы что-то видим.
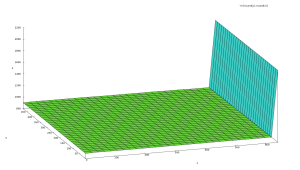
Что-то не то :)
Стоит заметить, что в режиме сырых данных FREENECT_DEPTH_11BIT самые правые 8 столбцов не используются и всегда возвращают значение FREENECT_DEPTH_RAW_MAX_VALUE. Об этом не стоит забывать при последующих действиях.
Поэтому нам нужно посмотреть плоскость без правых столбцов (8 штук).
(%i4) plot3d (f(x, y), [x, 1, 632], [y, 1, 480]);
И тут уже то, что нам надо.
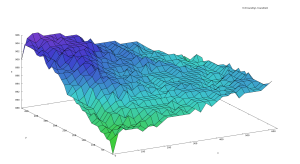
Это плоскость. Но не очень плоская. И таки да. Надо сделать ее обратно плоской. :)
Мы знаем, что все точки данной поверхности равноудалены от плоскости, где расположен сенсор.
Поэтому можно ввести коэффициент нормировки для каждой из точек (x, y). Который будет равен отношению реального расстояния к полученному.
Зная этот коэффициент можно узнать, реальное расстояние до точки. Просто умножив полученное от кинекта значение на коэффициент нормировки в данной точке (x, y).
Коэффициенты считаем один раз по калибровочному изображению. А затем загружаем в свое приложение и пользуемся.
Минусы решения
- Я предположил, что коэффициент нормировки зависит только от координат (x, y), но не зависит от глубины. Так это или нет - проверю. (пока датчик говорит, что я прав)
- Плоскость по которой выполняется калибровка должна находится на расстоянии 2,5-3,5 метров от сенсора. Именно при таком положении коэффициенты нормировки будет точными.
- Так как сенсор довольно чувствителен, то его положение должно быть параллельно плоскости калибровки (мне помогал обычный строительный уровень)
- Так же перед калибровкой полученное изображение плоскости нужно сгладить для того, чтобы избавиться от шумов (это умеет делать матлабоский smoothn)
UPD
Grunt для самых маленьких
На проекте есть папка с с js и стилями css.
Нужно все это минифицировать.
1 - нам нужен грант (установленный локально).
Предполагается, что глобально грант уже установлен.
Если нет, то
$ sudo yum install nodejs-grunt*
Ставим нужное
$ npm install grunt
$ npm-install grunt-contrib-unglify grunt-contrib-watch grunt-contrib-cssmin grunt-contrib-concat
Если не поставить модули локально, то получим ошибку
Unable to find local grunt
2 - создаем файл с описанием проекта package.json
{
"name": "<project name>",
"version": "0.1.0",
"devDependencies": {
"grunt": "~0.4.5",
"grunt-contrib-concat": "^0.4.0",
"grunt-contrib-cssmin": "^0.10.0",
"grunt-contrib-uglify": "^0.5.0",
"grunt-contrib-watch": "*"
},
"dependencies": {
"grunt": "^0.4.5",
"grunt-ts": "^1.11.13"
}
}
3 - создаем сценарий для работы
module.exports = function (grunt) {
// 1 - Описываем все выполняемые задачи
grunt.initConfig({
pkg: grunt.file.readJSON('package.json'),
concat: {
css: {
src: ['src/**/*.css'],
dest: 'dist/app.css'
},
js: {
src: ['src/js/**/*.js'],
dest: 'dist/app.js'
}
},
cssmin: {
css: {
src: 'dist/app.css',
dest: 'dist/app.min.css'
}
},
uglify: {
js: {
src: 'dist/app.js',
dest: 'dist/app.min.js'
}
},
watch: {
css: {
files: ['src/css/**/*.css'],
tasks: ['concat:css', 'cssmin:css']
},
js: {
files: ['src/js/**/*.js'],
tasks: ['concat:js', 'uglify:js']
}
}
});
// 2 - Загружаем нужные плагины
grunt.loadNpmTasks('grunt-contrib-concat');
grunt.loadNpmTasks('grunt-contrib-cssmin');
grunt.loadNpmTasks('grunt-contrib-uglify');
grunt.loadNpmTasks('grunt-contrib-watch');
// 3 - Говорим grunt, что мы хотим сделать, когда напечатаем grunt в терминале.
grunt.registerTask('default', ['concat', 'cssmin', 'uglify']);
};
4 - печатаем grunt в терминали
$ grunt
Running "concat:js" (concat) task
File gapi.js created.
Running "uglify:js" (uglify) task
>> 1 file created.
Done, without errors.