Kinect: Приведение координат сенсора в метрические
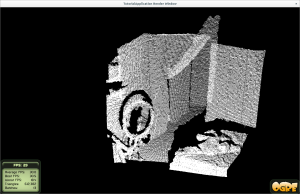
В одниокм из своих проектов с использованием сенсора пришлось задаваться вопросом: как привиодить координаты сенсора (глубину) в координаты метрические. Если этого не сделать, то прямые углы у стен прямыми не будут.
Будет это выглядеть как на картинке ниже.
А как это сделать?
В пакете freenect есть демка glpclview в коде которой можно увидеть матрицу преобразований координат сенсора в нужные нам координаты.
// Do the projection from u,v,depth to X,Y,Z directly in an opengl matrix
// These numbers come from a combination of the ros kinect_node wiki, and
// nicolas burrus' posts.
void LoadVertexMatrix()
{
float fx = 594.21f;
float fy = 591.04f;
float a = -0.0030711f;
float b = 3.3309495f;
float cx = 339.5f;
float cy = 242.7f;
GLfloat mat[16] = {
1/fx, 0, 0, 0,
0, -1/fy, 0, 0,
0, 0, 0, a,
-cx/fx, cy/fy, -1, b
};
glMultMatrixf(mat);
}
Не будем заострять внимание на очень понятных комментариях в коде :), а попробуем понять, чтоже эта штука делает.
Сходу информации почти нет - гугл говорит, что это есть лишь приведение координат согласно калибровочным данным самого кинекта (тыц).
Но это нифига не проясняет.
Дальнейшее гугление нашло пруф на форуме ROS, а так же пруф в гуглогруппах.
В итоге на скорую руку был состряпан код, который делает нужное преобразование.
/**
* Преобразует глубину в реальное значение (в миллиметрах)
*/
double raw_depth_to_millimeters(int depth_value){
double depth_value_f = (float) depth_value;
if (depth_value < 2047){
float depth = 1000.0 / (depth_value_f * -0.0030711016 + 3.3309495161);
return depth;
}
return 0.0f;
}
/**
* Преобразует вируальную точку point в точку с реальными координатами (в миллиметрах)
*/
Ogre::Vector3 depth_to_realword(Ogre::Vector3 point){
double fx_d = 1.0 / 5.9421434211923247e+02;
double fy_d = 1.0 / 5.9104053696870778e+02;
double cx_d = 3.3930780975300314e+02;
double cy_d = 2.4273913761751615e+02;
double depth = raw_depth_to_millimeters(point.z);
return Ogre::Vector3(
(point.x - cx_d) * depth * fx_d,
(point.y - cy_d) * depth * fy_d,
depth);
}
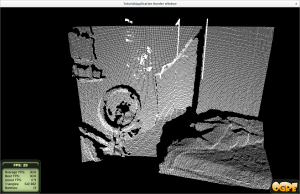
Про этот код важно помнить, что координаты x и y должны назодиться в первой четверти (больше нуля).
Теперь изображение выглядит куда лучше. :)