Windows: как подружить git и встроенный ssh
Оказывается в винде уже достаточно долго можно ставить и использовать линуксовые сервисы без wsl из коробки. В том числе и ssh.
Конечно же хочется подружить имеющийся ssh с гитом и другими приложениями так, чтобы они автоматически использовали ssh-agent с хранилищем ключей.
Если этого не сделать, то гит в дефолтной конфигурации использует свой собсвенный ssh, а это приводит к тому, что каждый раз он запрашивает пароль для ключа.
Поставим и настроим ssh+ssh-agent
Get-WindowsCapability -Online | ? Name -like 'OpenSSH.Client*'
set-service ssh-agent -StartupType ‘Automatic’
Start-Service ssh-agent
Тем самым мы сделали два действия: поставили клиент и включили ssh-agent, а так же включили его запуск при старте системы.
Заставим git использовать правильный ssh
git config --global core.sshCommand C:/Windows/System32/OpenSSH/ssh.exe
Указываем путь к ssh, который надо использовать.
Литература:
Android: Настройка android emulator в windows
Android Emulator, windows и встроенная видеокарта amd часто вызывают тонны головной боли.
- не устанавливается aehd
- не запускается виртуальная машина
Мы с вами рассмотрим обе эти проблемы и заодно поймём, почему большинство мануалов в интернете не работаю и не решают проблемы.
Не работает и не устанавливается aehd.
Aehd (он же android emulator hypervisor driver) нужен для аппаратного ускорения виртуальных машинх. Если у вас есть поддержка виртуализации в процессоре (а она скорее всего у вас есть, ведь за последние годы просто перестали производить cpu без подобных расширений), то она вам точно нужна.
Сначала ставим android sdk, а потом видим, что не поставился android emulator driver.
Можно пойти по мануалу и увидеть следующие ошибки в консоли:
>silent_install.bat
[SC] ControlService FAILED 1062:
The service has not been started.
[SC] DeleteService SUCCESS
[SC] StartService FAILED with error 4294967201
Если кратко, то существуют два способа запуска эмулятора на винде.
- Aehd. Он же android emulator hypervisor driver. Является форком kvm под винду
- Hyper V. Он же компонент винды и платформа для виртуализации уже в маздае.
Чем же они принципиально отличаются и нужен ли вам первый или второй?
Первый нужен для всех версий ниже pro. Потому что в них нет гипер ви. А вот всё, что выше pro должно работать уже с нормальным гипервизором.
Поэтому если у вас первый вариант (а скорее всего у вас win >= pro :)), то смотрим в документацию.
А вот если у вас второй вариант, то надо обязательно поставить платформу hyper v из дополнительных компонентов windowa в панели управления.
Картинки тут.
Не запускается эмулятор
А вот тут у вас скорее всего AMD и комбинация из встроенной и дискретной видеокарты.
Что можно сделать?
Идём в папку sdk с эмулятором.
>cd %USERPROFILE%\AppData\Local\Android\Sdk\emulator
Смотрим, какие машинки созданы в андроид-студии.
>emulator -list-avds
Medium_Phone_API_35
У меня это только Medium_Phone_API_35.
Пробуем её запустить и мониторим консоль на предмет ошибок. Скорее всего у вас тоже будет что-то такое как у меня.
>emulator -avd Medium_Phone_API_35 -netdelay none -netspeed full -qt-hide-window -grpc-use-token -idle-grpc-timeout 0
...
←[0;39mandroid_startOpenglesRenderer: gpu infoGPU #1
Make: 10de
Model: NVIDIA GeForce GTX 1650 Ti
Device ID: 1f95
I1224 02:58:38.110433 2788 HealthMonitor.cpp:279] HealthMonitor disabled.
I1224 02:58:38.110789 2788 VulkanDispatch.cpp:137] Added library: vulkan-1.dll
ERROR: vkGetPhysicalDeviceProperties: Invalid physicalDevice [VUID-vkGetPhysicalDeviceProperties-physicalDevice-parameter]
И если мы видим что-то связанное с вулканом, то сначала пробуем отключить его через консоль. Добавляем параметр -feature -Vulkan.
>emulator -avd Medium_Phone_API_35 -netdelay none -netspeed full -qt-hide-window -grpc-use-token -idle-grpc-timeout 0 -feature -Vulkan
Эмулятор запустился скорее всего. Завершаем его по ctrl-c. И теперь надо сконфигурировать студию так, чтобы в эмуляторах она вулкан не использовала.
Не надо отключать автоматический выбор видеокарты как это делаю многие через задание перемённой DISABLE_LAYER_AMD_SWITCHABLE_GRAPHICS_1. Очень опрометчивое решение. Не рекомендую.
Редактируем файл %USERPROFILE%\.android\advancedFeatures.ini добавляя в него пару строк для отключения. Если файла нет, то надо его создать.
Vulkan = off
GLDirectMem = on
И, кстати, этот приём действует как для маздая, так и для линукса. Они оба подвержены проблеме с графиков.
Решится это может только обновлением драйвера для amd, что маловероятно.
Документация в которой ничего нет:
- https://developer.android.com/studio/run/emulator-troubleshooting?hl=ru
Linux: Создание rescue-записи grub в Fedora
Для систем, которые существуют очень долго и обновляются через версии есть опасность того, что rescue ядро не заведётся. Вернее оно заведётся, но работать будет некомфортно.
А так как механизма обновления ядра в дефолте нет, то стоит производить его руками хотя бы раз в несколько версий дистрибутива.
$ sudo rm /boot/*rescue*
$ sudo /usr/lib/kernel/install.d/51-dracut-rescue.install add "$(uname -r)" /boot "/boot/vmlinuz-$(uname -r)"
KDE: Dolphin не может создать файл на nfs, а консоль может
Итак. Существует проблема в связке nfs+dolphin. Настолько большая, что многие пользователи попросту не используют nfs.
Она заключается в том, что если на каталоге установлено сопоставление с анонимным пользователем для всех (через all_squash), то в ряде случаев пользователи просто не могут создавать каталоги и файлы из dolphin (где-то видел упоминание о том, что nautilus так же поломан). Только через консоль (либо альтернативные менеджеры)
Проблема имеет лишь несколько веток на реддите вида Dolphin Can’t Edit Synology NFS Folders Even When User Has Permissions?
Хотя и обычный nfs подвержен таким же проблемам.
Рассматривать будем на примере nas от synology.
Данное явление распространяется как на nfs3, так и на nfs4. Последнюю использовать дома смысла нет - её преимущества раскрываются только в домене.
На записи ниже хорошо видно как проявляет себя проблема.
Казалось бы. Пользователь сопоставляется с админом. На каталоге есть права для пользователя. Что ещё надо?
# cat /etc/exports
/volume1/projects 192.168.1.0/24(rw,async,no_wdelay,all_squash,insecure_locks,sec=sys,anonuid=1024,anongid=100)
$ ls -ld misc/
drwxrwxr-x. 3 nas-writer users 4096 окт 21 23:14 misc/
$ ls -ld misc/Новая\ папка/
drwxr-xr-x. 2 nas-writer users 4096 окт 21 23:18 'misc/Новая папка/'
Попробуем добавить прав как это сделано с родительским каталогом.
$ sudo chmod g+w misc/Новая\ папка/
$ ls -ld misc/Новая\ папка/
drwxrwxr-x. 2 nas-writer users 4096 окт 21 23:18 'misc/Новая папка/'
И опять ничего не выходит:
И даже если добавить права на всех (a+w), то мы тоже не сможем создавать файлы и каталоги из файлового менеджера.
$ sudo chmod a+w misc/Новая\ папка/
$ ls -ld misc/Новая\ папка/
drwxrwxrwx. 2 nas-writer users 4096 окт 21 23:18 'misc/Новая папка/'
Корни проблемы:
- в первую очередь проблема в KIO и KDE (там есть баг аж от 2015 года).
- во вторую очередь - это чехарда с правами на самой станции (которая иногда случается когда файлы копируются туда-сюда или рсинкаются).
Давайте посмотрим на то, что происходит на станции.
Разрешения папки misc.
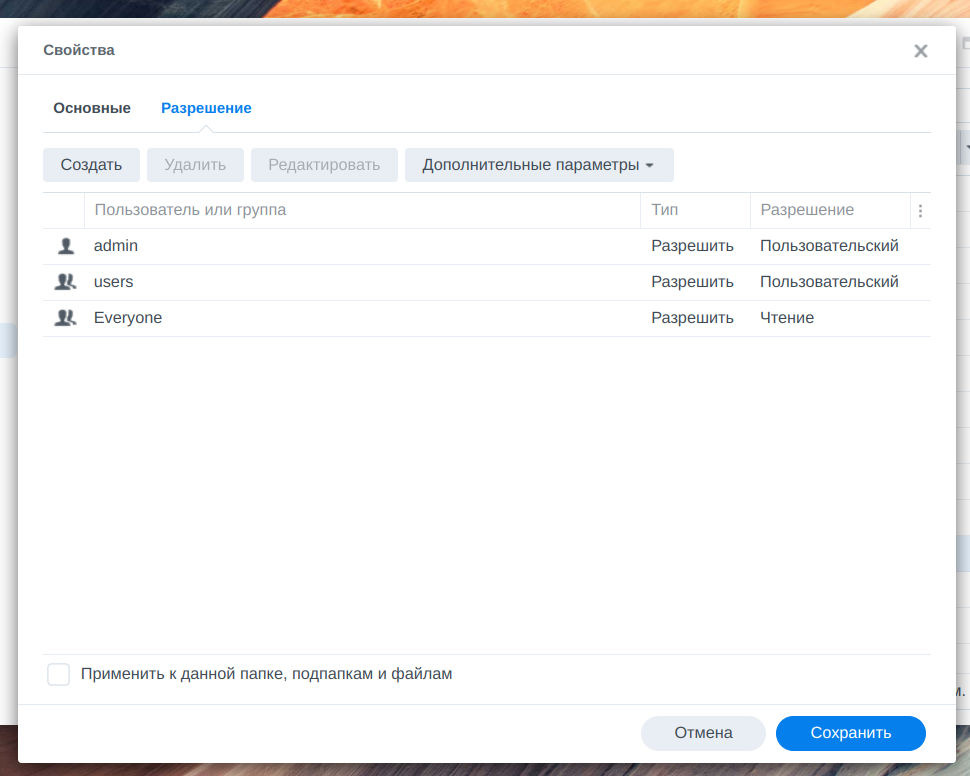
И разрешение папки Новая папка.
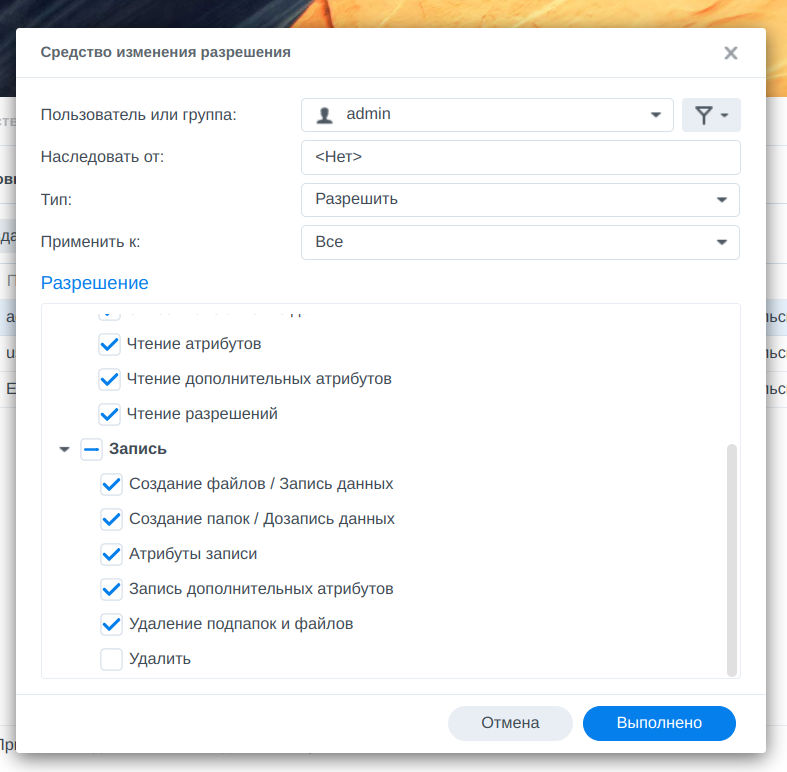
Очевидно, что они наследуются. Разрешение на запись для админа выглядит так:
Однако, если мы поставим a+w на папку misc, то dolphin сможет создавать файлы внутри нового каталога. И мы можем даже убрать права o-w на новую папку! И всё равно файлы создавать можно.
$ sudo chmod a+w misc
$ ls -ld misc/
drwxrwxrwx. 4 nas-writer users 4096 окт 21 23:18 misc/
$ sudo chmod o-w misc/Новая\ папка/
$ ls -ld misc/Новая\ папка/
drwxrwxr-x. 2 nas-writer users 4096 окт 21 23:18 'misc/Новая папка/'
И я даже знать не хочу почему это работает.
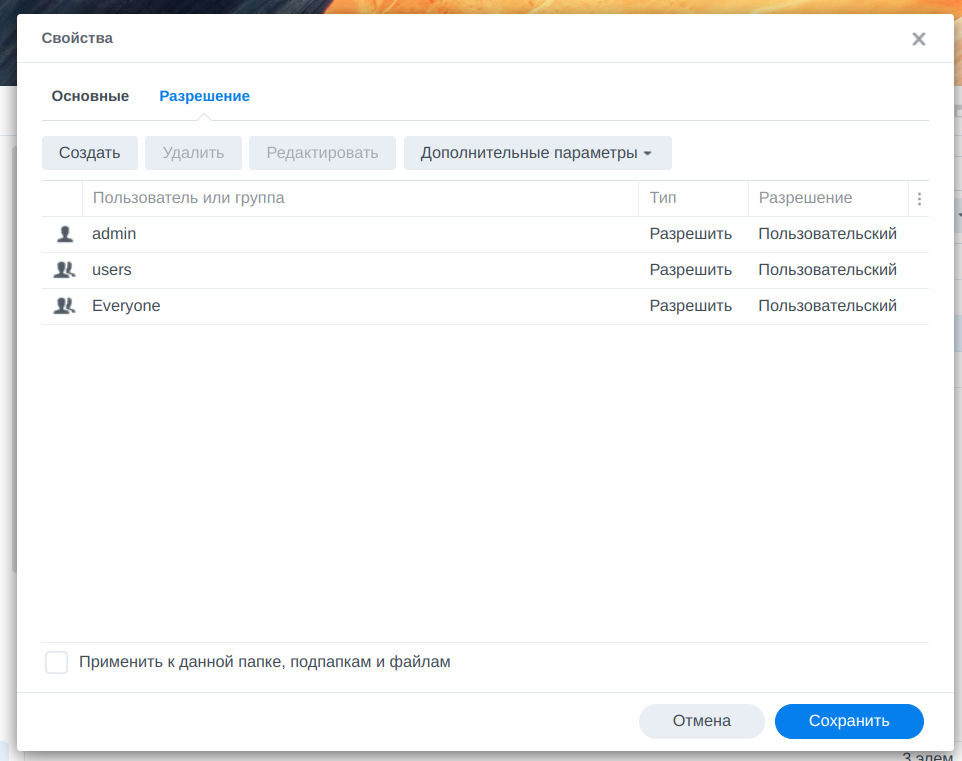
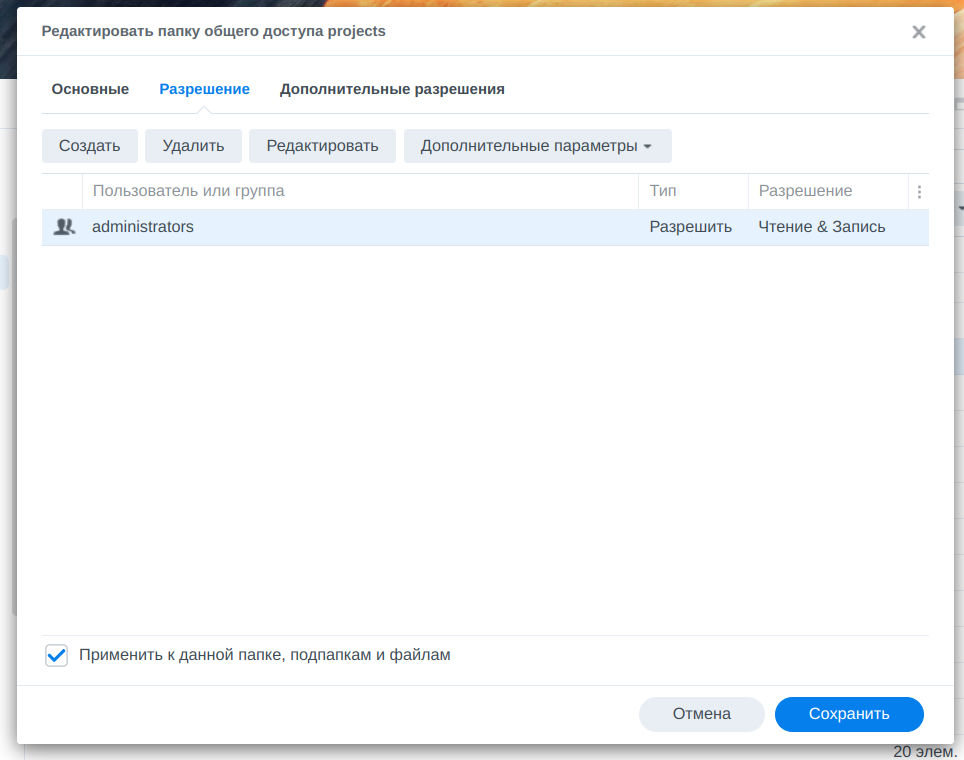
Теперь мы можем всё починить. Так как при создании папок права наследуются от родительского объекта, то нам нужно для группы администраторов (а в данном случае это именно так и есть) дать полный доступ на родительский каталог и на все существующие в данным момент папки.
Для этого установим администраторов единственной группой с полным доступом к файлам.
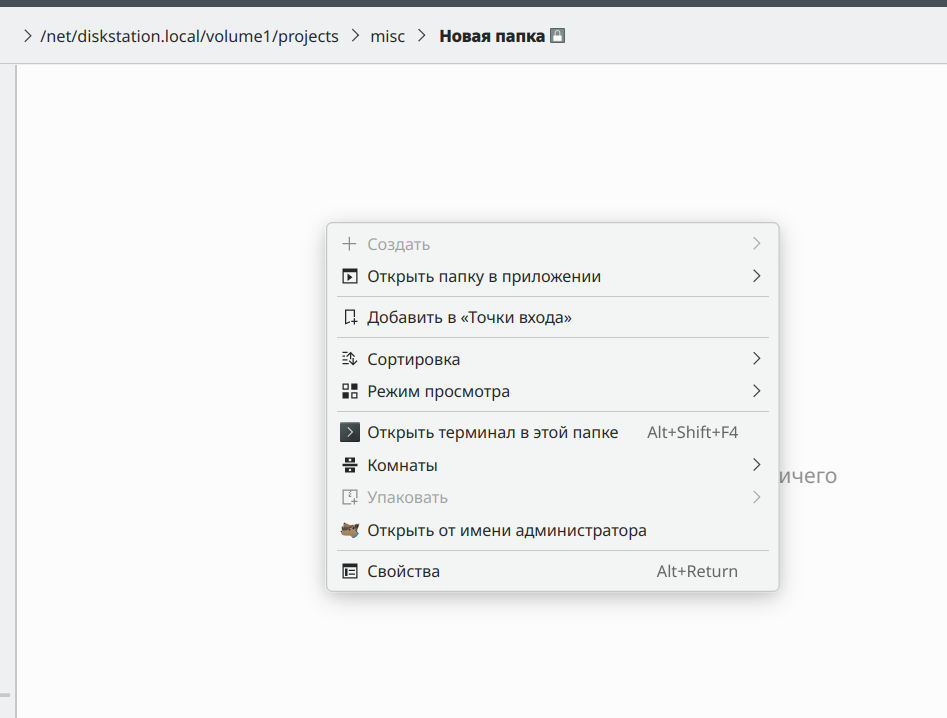
Для этого в файловом менеджере на станции выбираем экспортируемый каталог и на вкладке разрешений устанавливаем следующие права.
Обязательно выставляем флажок для применения ко вложенным объектам.
Стоит отметить еще один эффект: теперь все файлы и папки создаются с правами 777.
Даже если они создаются через smb-шару.
Речь идет только о шарах с полным доступом для всех пользователей. Т.н. файлопомойки. Задача таких мест - это позволять любому пользователю писать и удалять любые объекты. В статье мы не рассматриваем случай с авторизованными пользователями - там всё и так хорошо.
Вообще стоит объяснить почему так происходит.
В данном случае применяется не обычные права доступа, а расширенный acl. Он настраивается таким образом, что дочерние объекты наследуют пермиссии родительских.
Давайте посмотрим на примере.
$ mkdir test
$ ls -la
итого 0
drwxr-xr-x. 1 penguin penguin 8 окт 22 00:11 .
drwx------. 1 penguin penguin 810 окт 22 00:05 ..
drwxr-xr-x. 1 penguin penguin 0 окт 22 00:11 test
$ cd test/
$ mkdir test_2
$ ls -la
итого 0
drwxr-xr-x. 1 penguin penguin 12 окт 22 00:11 .
drwxr-xr-x. 1 penguin penguin 8 окт 22 00:11 ..
drwxr-xr-x. 1 penguin penguin 0 окт 22 00:11 test_2
$ cd ..
$ chmod g+w test/
$ cd test/
$ mkdir test_3
$ ls -la
итого 0
drwxrwxr-x. 1 penguin penguin 24 окт 22 00:11 .
drwxr-xr-x. 1 penguin penguin 8 окт 22 00:11 ..
drwxr-xr-x. 1 penguin penguin 0 окт 22 00:11 test_2
drwxr-xr-x. 1 penguin penguin 0 окт 22 00:11 test_3
Видим, что изменение прав на родительский каталог никак не повлияло на создание дочернего каталога test_3. Потому что права подчиняются установленной в система umask, dmask и fmask.
А теперь то же самое, но с acl.
$ mkdir test
$ ls -la
итого 0
drwxr-xr-x. 1 penguin penguin 8 окт 22 00:16 .
drwx------. 1 penguin penguin 810 окт 22 00:05 ..
drwxr-xr-x. 1 penguin penguin 0 окт 22 00:16 test
$ cd test/
$ mkdir test_2
$ ls -la
итого 0
drwxr-xr-x. 1 penguin penguin 12 окт 22 00:16 .
drwxr-xr-x. 1 penguin penguin 8 окт 22 00:16 ..
drwxr-xr-x. 1 penguin penguin 0 окт 22 00:16 test_2
$ cd ../
$ setfacl --recursive --modify u:penguin:rwX,g:penguin:rwX,d:g:penguin:rwX,d:u:penguin:rwX test
$ ls -la
итого 0
drwxr-xr-x. 1 penguin penguin 8 окт 22 00:16 .
drwx------. 1 penguin penguin 810 окт 22 00:05 ..
drwxrwxr-x+ 1 penguin penguin 12 окт 22 00:16 test
$ getfacl test/
# file: test/
# owner: penguin
# group: penguin
user::rwx
user:penguin:rwx
group::r-x
group:penguin:rwx
mask::rwx
other::r-x
default:user::rwx
default:user:penguin:rwx
default:group::r-x
default:group:penguin:rwx
default:mask::rwx
default:other::r-x
$ cd test/
$ ls -la
итого 0
drwxrwxr-x+ 1 penguin penguin 12 окт 22 00:16 .
drwxr-xr-x. 1 penguin penguin 8 окт 22 00:16 ..
drwxrwxr-x+ 1 penguin penguin 0 окт 22 00:16 test_2
$ mkdir test_3
$ ls -la
итого 0
drwxrwxr-x+ 1 penguin penguin 24 окт 22 00:18 .
drwxr-xr-x. 1 penguin penguin 8 окт 22 00:16 ..
drwxrwxr-x+ 1 penguin penguin 0 окт 22 00:16 test_2
drwxrwxr-x+ 1 penguin penguin 0 окт 22 00:18 test_3
В этом и кроется способ починки nfs и dolphin.
И еще стоит обратить внимание, что acl для nfs4 отличается. И именно поэтому стоит использовать nfs3 если у вас нет домена.
Python: парсим аргументы командной строки
Сегодня разберемся с сабпарсерами объекта argparse.ArgumentParser, которые передаются через параметр parents.
В общем случае при попытке распарсить аргументы командной строки мы создаем объект и начинаем методично добавлять к нему все известные нам параметры.
Иногда можно встретить очень большие листинги. Но существует механизм, который позволяет разбивать парсеры на более мелкие составляющие и сцеплять их между собой для более простого понимания (кстати, очень полезно при создании системы плагинов).
При этом мы можем управлять тем, какие аргументы будут парсится.
Для этого в параметры parents можно передать те объекты, от которых надо унаследоваться.
Рассмотрим на примерах.
В первом случае создается ArgumentParser с одним аргументом. И он сразу же разбирает командную строку на известные параметры и хвост при помощи parse_known_args.
В зависимости от значения -l мы либо продолжим работу, либо остановимся.
import argparse
parser = argparse.ArgumentParser(add_help=False)
parser.add_argument('-l', '--list', help="List something", action='store_true')
args, remaining = parser.parse_known_args()
if args.list:
print('List')
exit(0)
parser = argparse.ArgumentParser(
description="Chained parsers",
formatter_class=argparse.RawDescriptionHelpFormatter,
parents=[parser])
parser.add_argument('-t', '--test', help="Test", action='store_true')
other_args = parser.parse_args(remaining)
print('Args: {}'.format(other_args))
Второй пример чуть более сложный.
Допустим, что код обрабатывает видеофайлы и аудиофайлы. В зависимости от этого у него меняется поведение атрибута -r.
import argparse
import enum
class Formats(enum.Enum):
VIDEO='video'
AUDIO='audio'
def __str__(self):
return self.value
def parser_common():
parser = argparse.ArgumentParser(add_help=False)
parser.add_argument(
'-f', '--format', help="Specify format", type=Formats, choices=list(Formats)
)
return parser
def parser_video(parent_parser: argparse.ArgumentParser) -> argparse.ArgumentParser:
parser = argparse.ArgumentParser(
description="Video parser",
formatter_class=argparse.RawDescriptionHelpFormatter,
parents=[parent_parser])
parser.add_argument(
'-r',
'--resolution',
help="Resolution",
type=int,
nargs=2,
metavar=('WIDTH', 'HEIGHT'),
required=True,
)
return parser
def parser_audio(parent_parser: argparse.ArgumentParser) -> argparse.ArgumentParser:
parser = argparse.ArgumentParser(
description="Audio parser",
formatter_class=argparse.RawDescriptionHelpFormatter,
parents=[parent_parser])
parser.add_argument(
'-r',
'--resolution',
help="Audit resolution",
type=int,
required=True,
)
return parser
def main():
parser = parser_common()
args, remaining = parser.parse_known_args()
if args.format == Formats.AUDIO:
parser = parser_audio(parser)
elif args.format == Formats.VIDEO:
parser = parser_video(parser)
else:
parser.print_help()
exit(1)
other_args = parser.parse_args(remaining)
print(2)
print('Args: {}'.format(other_args))
if __name__ == '__main__':
main()
Запустите и посмотрите, как ведёт себя данный код.
$ python argsparser.py
usage: argsparser.py [-f {video,audio}]
options:
-f {video,audio}, --format {video,audio}
Specify format
$ python argsparser.py -f audio
usage: argsparser.py [-h] [-f {video,audio}] -r RESOLUTION
argsparser.py: error: the following arguments are required: -r/--resolution
$ python argsparser.py -f video
usage: argsparser.py [-h] [-f {video,audio}] -r WIDTH HEIGHT
argsparser.py: error: the following arguments are required: -r/--resolution
$ python argsparser.py -f video -h
usage: argsparser.py [-h] [-f {video,audio}] -r WIDTH HEIGHT
Video parser
options:
-h, --help show this help message and exit
-f {video,audio}, --format {video,audio}
Specify format
-r WIDTH HEIGHT, --resolution WIDTH HEIGHT
Resolution
$ python argsparser.py -f audio -h
usage: argsparser.py [-h] [-f {video,audio}] -r RESOLUTION
Audio parser
options:
-h, --help show this help message and exit
-f {video,audio}, --format {video,audio}
Specify format
-r RESOLUTION, --resolution RESOLUTION
Audit resolution